
-
-
-
Tổng tiền thanh toán:
-
Hướng dẫn Điều khiển vị trí bằng xung và tín hiệu hướng (MINAS A5/A5E/A6SG/A6SF)
Đăng bởi CÔNG TY TNHH KORESU 28/02/2025

 1")
Hướng dẫn Điều khiển vị trí bằng xung và tín hiệu hướng (MINAS A5/A5E/A6SG/A6SF)
Trong bài này nhằm giúp bạn thiết lập hệ thống truyền động servo MINAS. Nó là dựa trên thông tin từ hướng dẫn sử dụng sê-ri MINAS và kinh nghiệm thực tế của chúng tôi. Hướng dẫn từng bước sẽ hướng dẫn bạn cách kết nối PLC với trình điều khiển servo MINAS và thiết lập các thông số quan trọng nhất.
Tổng quan về chức năng
Điều khiển vị trí là chế độ điều khiển trong đó động cơ di chuyển tải đến một mục tiêu xác định chức vụ. Trình điều khiển servo có thể được điều khiển bằng chuỗi xung trong dải tần từ 1Hz đến 8MHz từ bộ điều khiển máy chủ như PLC hoặc bộ điều khiển CNC hoặc bằng hoạt động của khối. Hướng dẫn này giải thích cách đấu dây và định cấu hình trình điều khiển servo để nhận xung từ một PLC.
Đầu nối của trình điều khiển vị trí servo
– Đầu nối XA (đầu nối nguồn chính)
Kết nối cáp cấp nguồn với đầu nối XA. Đối với nguồn điện 1 pha 230V thì kết nối cáp 2 dây với trình điều khiển servo như minh họa. Chân L2 không được sử dụng.
 2")
– Đầu nối XB (đầu nối động cơ)
Kết nối cáp động cơ với đầu nối XB. Các dây được dán nhãn bằng các chữ cái U, V và W. Không thay đổi trình tự các pha của động cơ, ví dụ: bằng cách nối V với W.
 3")
– Đầu nối X6 (đầu nối bộ mã hóa)
Kết nối cáp bộ mã hóa Enconder với đầu nối X6.
 4")
– Đầu nối X4 (đầu nối I/O)
Kết nối cáp kết nối với đầu nối X4 và với PLC S7-1200 SIEMENS.
 5")
– Đầu nối X1 (đầu nối USB để kết nối PC)
Trình điều khiển servo được cấu hình bằng phần mềm cấu hình PC PANATERM. Sử dụng một cáp USB A đến mini-B có sẵn trên thị trường để kết nối PC với trình điều khiển servo.
 6")
– Đầu vào và đầu ra tín hiệu của đầu nối X4.
Để điều khiển vị trí, đầu nối X4 của trình điều khiển servo MINAS A5/A6 được trang bị tín hiệu đầu vào và đầu ra. Đối với đầu vào xung, bạn có thể sử dụng đầu vào trình điều khiển dòng (44, 45, 46, 47) nếu cần tốc độ cao hoặc độ phân giải cao hoặc bạn có thể sử dụng bộ thu mở đầu vào (1, 2, 4, 6 hoặc 3, 4, 5, 6). Các đầu vào xung được đánh dấu trong sơ đồ nối dây. Trong ví dụ của chúng tôi, chúng tôi sẽ sử dụng các đầu vào và đầu ra tín hiệu sau:
- OPC1 (chân 1), OPC2 (chân 2), PULS2 (chân 4), SIGN2 (chân 6) : Mở đầu vào bộ thu để nhận xung lệnh từ PLC.
- SRV-ON (chân 29) : Đầu vào bật servo để kích hoạt động cơ servo.
- COM+ (chân 7) : Đầu vào chung cho nguồn điện của các tín hiệu điều khiển.
- S-RDY (chân 34–35) : Đầu ra servo-sẵn sàng để cho biết trạng thái sẵn sàng của trình điều khiển.
- ALM (chân 36–37) : Đầu ra báo động servo.
- A-CLR (chân 31) : Đầu vào để xóa báo động.
- INP (chân 38–39) : Đầu ra định vị hoàn chỉnh sẽ bật khi đạt đến vị trí mục tiêu.
 7")
– Cách đấu PNP của đầu nối X4
 8")
– Cách đấu NPN của đầu nối X4
 9")
Tổng quan về thông số cơ bản
Có các tham số cơ bản liên quan đến điều khiển vị trí. Bảng sau đây hiển thị phạm vi cài đặt và mô tả các tham số cơ bản.
 10")
– Pr0.00 (Chiều quay động cơ)
Tham số PANATERM: “Cài đặt hướng quay”
Phạm vi cài đặt: 0 hoặc 1
Giá trị mặc định là 1: Xoay theo hướng CCW (hướng ngược chiều kim đồng hồ).
– Pr0.01 (Chế độ điều khiển)
Tham số PANATERM: “Cài đặt chế độ điều khiển”
Phạm vi cài đặt: 0 đến 6
Giá trị mặc định là 0: Kiểm soát vị trí
Chọn 0: Điều khiển vị trí
– Pr0.06 (Lệnh đếm hướng xung)
Tham số PANATERM: “Lệnh thiết lập hướng quay xung”
Phạm vi cài đặt: 0 hoặc 1
Giá trị mặc định là 0: Hướng đếm dương = B dẫn A, đầu vào SIGN, logic cao tín hiệu.
– Pr0.07 (Lệnh chế độ đầu vào của xung)
Tham số PANATERM: “Thiết lập chế độ đầu vào xung lệnh”
Phạm vi cài đặt: 0 đến 3
Chọn một trong các chế độ đầu vào xung sau tùy thuộc vào cấu hình của máy chủ bộ điều khiển.
1: Hướng đếm dương/âm (đếm tăng/giảm)
Đây là thiết lập mặc định.
 11")
0 hoặc 2: đầu vào xung 2 pha
Chọn chế độ đầu vào xung này nếu bộ mã hóa hoặc đầu ra bộ mã hóa được sử dụng.
 12")
3: Xung và tín hiệu hướng
Có thể thay đổi hướng quay bằng cách đảo ngược các mức logic của đầu vào hướng.
 13")
– Pr0.08 (Số tín hiệu xung trên mỗi vòng quay của động cơ)
Tham số PANATERM: “Lệnh số xung trên một vòng quay động cơ”
Phạm vi cài đặt: 0 đến 1048576 [xung] (MINAS A5), 0 đến 8388608 [xung] (MINAS A6)
Giá trị mặc định là 10000 xung trên mỗi vòng quay động cơ.
– Pr0.09 (Tử số tỷ số truyền) và Pr0.10 (Mẫu số tỷ số truyền)
Tham số PANATERM: “Tử số chia/nhân lệnh đầu tiên” (Pr0.09) và “Lệnh chia/mẫu số nhân” (Pr0.10) Khoảng thiết lập: 0 đến 1073741824 (Pr0.09) và 1 đến 1073741824 (Pr0.10)
Giá trị mặc định là 0 cho Pr0.09 và 10000 cho Pr0.10.
Nếu Pr0.09 khác 0, Pr0.08 sẽ không có hiệu lực.
-Pr5.32 (Tần số đầu vào xung tối đa)
Tham số PANATERM: “Thiết lập tối đa đầu vào xung lệnh/thiết lập bộ lọc kỹ thuật số”
Dải cài đặt: 250 đến 4000 [kHz] (MINAS A5), 250 đến 8000 [kHz] (MINAS A6)
Giá trị mặc định 4000kHz (4 MHz) chủ yếu dành cho bộ điều khiển máy chủ (CNC hoặc PLC) với đầu ra trình điều khiển dòng. Cài đặt cho phép trình điều khiển tự chuẩn bị cho đầu ra xung tần số của bộ điều khiển máy chủ được phát hiện. Ví dụ: nếu tần số đầu vào xung tối đa thấp hơn giá trị có thể định cấu hình tối thiểu nếu PLC có tần số đầu ra xung tối đa là 100kHz, hãy nhập 250 trong PANATERM để giảm thiểu các vấn đề về EMC.
Đấu nối tín hiệu điều khiển xung và số (Sink) - Servo Panasonic, PLC Mitsubishi

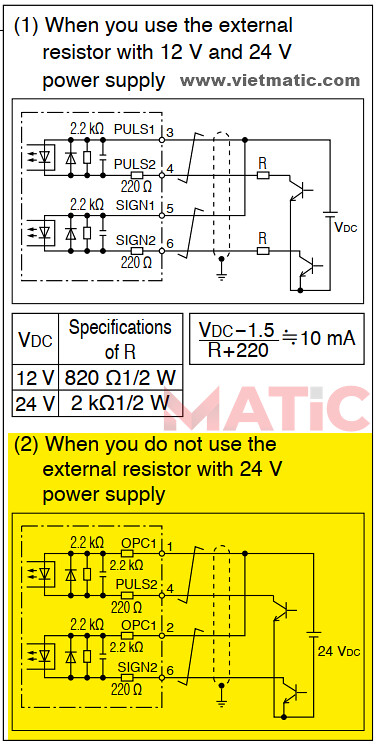
Driver Servo Panasonic MINAS A5 cho phép nhận tín hiệu dạng tín hiệu điện áp cố định 24VDC hoặc điện áp tùy chỉnh (12V/ 24V).
Ở đây, vì kết hợp với PLC có tín hiệu xung và điều khiển điện áp 24VDC, để thuận trong quá trình sử dụng. Có thể chọn kiểu kết nối tín hiệu điện áp 24VDC không sử dụng điện trở bên ngoài như phần "bôi vàng" bên dưới.
Sơ đồ đấu nối chi tiết giữa PLC Mitsubishi dòng FX và mach3 CNC và Driver servo Panasonic MINAS A5:
- COM+ (Pin số 7) = +24VDC. Chân dương của nguồn nuôi cho mạch điều khiển servo.
- SRV-ON (Pin số 29) = Y3. Tín hiệu kích cho Servo sẵn sàng.
- COM- (Pin số 41) = 0VDC. Chân âm của nguồn nuôi cho mạch điều khiển servo.
- OPC1 (Pin số 1 và số 2) = +24VDC. Chân tín hiệu cho logic Sink cho xung vào.
- OPC1 (Pin số 3 và số 5) = +5VDC. Chân tín hiệu cho logic Sink cho xung vào. đối với mach3 hoặc plc xuất 5 đến 12 vôn
- PULS2 (Pin số 4) = Y0. Chân kích xung chạy (Sink)
- SIGN2 (Pin số 6) = Y4. Chân đảo chiều động cơ servo (Sink)
Chia sẻ:



