
-
-
-
Tổng tiền thanh toán:
-
CÔNG NGHỆ ĐIỀU KHIỂN ĐỘNG CƠ SERVO
Đăng bởi CÔNG TY TNHH KORESU 02/10/2020

CÔNG NGHỆ ĐIỀU KHIỂN ĐỘNG CƠ SERVO
 Động cơ servo là thành phần quan trọng của hệ thống điều khiển chuyển động.
Động cơ servo là thành phần quan trọng của hệ thống điều khiển chuyển động.
Để hoạt động được, chúng ta phải nối động cơ servo với các phần cứng, phần mềm hỗ trợ điều khiển chuyển động.
Động cơ servo được kết hợp cơ khí với các thiết bị máy móc khác để cung cấp lực di chuyển các thiết bị này theo yêu cầu của ứng dụng.
Chúng ta sẽ cùng khám phá công nghệ để vận hành động cơ servo, bộ điều khiển động cơ servo và các phương pháp phản hồi để đạt được hoạt động như mong muốn.
Cấu hình hệ thống động cơ servo
Động cơ servo được sử dụng trong các hệ thống điều khiển chuyển động để cung cấp một lực cơ học cụ thể trong khoảng thời gian nhất định.
Để đạt được điều này, chúng ta phải điều khiển vị trí, vận tốc và mô men của động cơ servo theo yêu cầu ứng dụng.
Để hoạt động chuẩn xác, động cơ servo phải kết hợp với:
- Bộ điều khiển – Thông thường là PLC hoặc bộ điều khiển chuyển động chuyên dụng sẽ chạy chương trình điều khiển để thực hiện đúng theo yêu cầu kỹ thuật của ứng dụng.
- Bộ điều khiển động cơ – Thiết bị điện tử có chức năng cung cấp đủ năng lượng cho động cơ theo đúng cách, đúng thời điểm.
- Bộ mã hóa xung vòng quay – tạo phản hồi cho hoạt động của động cơ.
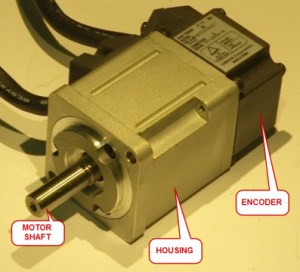
Cấu trúc động cơ servo
 Trong công nghiệp, hầu hết các dạng động cơ servo sử dụng động cơ một chiều không chổi than.
Trong công nghiệp, hầu hết các dạng động cơ servo sử dụng động cơ một chiều không chổi than.
Rotor của động cơ là một nam châm vĩnh cửu có từ trường mạnh. Stator của động cơ được cuốn các cuộn dây riêng biệt, được cấp nguồn theo một trình tự thích hợp để quay rotor.
Nếu thời điểm và dòng điện cấp tới các cuộn dây là chuẩn xác, chuyển động quay của rotor phụ thuộc vào tần số, pha, phân cực và dòng điện chạy trong cuộn dây stator.
Hãy kích chuột vào từng phần của động cơ servo để xem các thành phần bên trong của động cơ.
Bạn có thể thấy:
- Đĩa bộ mã hóa xung vòng quay
- Nam châm vĩnh cửu
- Cuộn dây stator
Chức năng của bộ điều khiển động cơ servo
Cần có nguồn điện cấp tương thích với thiết kế của động cơ servo. Bộ điều khiển động cơ servo thực hiện chức năng này.
Bộ điều khiển cung cấp nguồn cho động cơ servo đúng lượng, đúng thời điểm để điều khiển vị trí, tốc độ và mô men tương ứng với các đầu vào từ bộ điều khiển chuyển động, phản hồi từ bộ mã hóa xung vòng quay và từ bản thân động cơ servo.
Các chức năng khác của bộ điều khiển bao gồm:
- Truyền thông với bộ điều khiển chuyển động
- Đọc phản hồi từ bộ mã hóa xung vòng quay và điều chỉnh thời gian thực cho mạch vòng điều khiển kín.
- Xử lý các tín hiệu vào/ra ví dụ như các thiết bị an toàn, chế độ đầu vào và các tín hiệu đầu ra về trạng thái hoạt động.
Điều khiển năng lượng cho động cơ servo
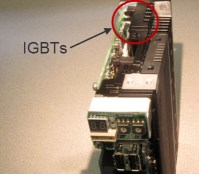 Bộ điều khiển điện động cơ servo sử dụng một hàng các transistor công suất được gọi là Transistor có cực điều khiển cách ly(IGBT) để kiểm soát năng lượng đưa vào động cơ servo.
Bộ điều khiển điện động cơ servo sử dụng một hàng các transistor công suất được gọi là Transistor có cực điều khiển cách ly(IGBT) để kiểm soát năng lượng đưa vào động cơ servo.
IGBT có khả năng chuyển mạch nhanh với dòng lớn nên là lựa chọn lý tưởng cho ứng dụng này.
IGBT được điều khiển bằng các thiết bị điện tử nhằm sản sinh ra các dạng điện áp, dòng điện, tần số, phân cực và pha đặc thù cung cấp cho động cơ servo.
Vì lý do này, mỗi bộ điều khiển thường kết hợp với một dòng động cơ servo cụ thể.
Trong khi tín hiệu đầu vào cho bộ điều khiển động cơ servo là dòng một chiều (DC), đầu ra bộ điều khiển gần như là dạng sóng điện xoay chiều để điều khiển trơn tốc độ, gia tốc và mô men của động cơ servo.
Tín hiệu điều khiển động cơ servo
 Dựa vào dữ liệu lưu trong chương trình điều khiển chuyển động, bộ điều khiển nhận tín hiệu để thực hiện một dạng chuyển động nhất định.
Dựa vào dữ liệu lưu trong chương trình điều khiển chuyển động, bộ điều khiển nhận tín hiệu để thực hiện một dạng chuyển động nhất định.
Tín hiệu từ bộ điều khiển chuyển động gửi tới bộ điều khiển động cơ servo có thể có nhiều dạng:
- Điện áp một chiều dạng tương tự (ví dụ như từ -12VDC đến +12VDC)
- Dãy xung
- Gói dữ liệu truyền qua mạng
Phản hồi trong hệ thống động cơ servo
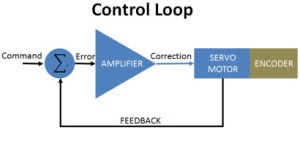 Bộ điều khiển và động cơ servo cùng hoạt động để vận hành trong chế độ mạch vòng kín.
Bộ điều khiển và động cơ servo cùng hoạt động để vận hành trong chế độ mạch vòng kín.
Khi sử dụng mạch phản hồi, vị trí thực tế, vận tốc hay mô men của động cơ servo được so sánh với lệnh chuyển động và bất kỳ sai số nào giữa các cặp giá trị trên đều được xác định.
Sau đó, bộ điều khiển động cơ servo sẽ sử dụng các thông tin sai số này để điều chỉnh hoạt động của động cơ theo thời gian thực, sao cho quá trình hoạt động của động cơ đáp ứng được yêu cầu của ứng dụng.
Chu trình phản hồi – xác định sai số – triệt tiêu sai số được gọi là mạch vòng điều khiển kín .
Mạch vòng điều khiển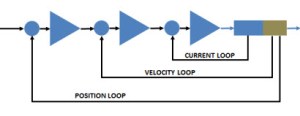
Mạch vòng điều khiển được xử lý bởi bộ điều khiển động cơ servo, bộ điều khiển chuyển động hoặc cả hai tùy thuộc vào yêu cầu điều khiển.
Để đạt được chuyển động như mong muốn cho ứng dụng của mình, chúng ta có thể tách riêng các mạch vòng điều khiển cho vị trí, vận tốc và mô men.
Không phải tất cả các ứng dụng điều khiển đều bao gồm cả ba dạng mạch vòng điều khiển vừa nêu. Nhiều ứng dụng chỉ gồm có mạch vòng dòng điện và mạch vòng tốc độ dùng cho điều khiển tốc độ. Nhiều ứng dụng lại cần có cả ba mạch vòng điều khiển để điều khiển vị trí.
- Điều khiển vị trí (position Loop)
Vị trí được hiểu là vị trí góc tuyệt đối của trục động cơ servo hoặc trong vài trường hợp, là vị trí của thiết bị truyền động bởi động cơ servo.
Khi động cơ servo thay đổi vị trí, bộ mã hóa xung vòng quay của động cơ servo sẽ gửi phản hồi vị trí thực tế của trục động cơ tới bộ điều khiển động cơ servo hoặc có thể gửi tín hiệu trực tiếp tới bộ điều khiển chuyển động.
Mạch vòng vị trí sẽ tiến hành so sánh vị trí đặt và vị trí thực tế; từ sai số nhận được và các thông số căn chỉnh của mạch vòng, bộ điều khiển tự động điều chỉnh vị trí trục quay động cơ theo thời gian thực để triệt tiêu sai lệch vị trí.
Theo cách này, động cơ servo sẽ thực hiện chính xác theo thông số đã đặt trước ngay cả khi điều kiện vận hành thay đổi. Ví dụ như, nếu thiết bị truyền động bởi động cơ servo trở nên khó di chuyển, bộ điều khiển động cơ servo sẽ điều khiển tăng mô men sinh ra và/hoặc điều khiển động cơ vận hành trong khoảng thời gian lâu hơn để đạt được vị trí mong muốn bất chấp ma sát của cơ cấu truyền động.
- Điều khiển tốc độ (Velocity Loop)
Tốc độ ở đây được hiểu là vận tốc và chiều quay của động cơ servo.
Khi động cơ servo tăng tốc hoặc giảm tốc, bộ mã hóa xung vòng quay sẽ gửi vận tốc và chiều quay thực tế tới bộ điều khiển động cơ servo hoặc gửi trực tiếp tới bộ điều khiển chuyển động.
Mạch vòng tốc độ sẽ so sánh tốc độ đặt với tốc độ hiện tại; dựa vào sai số tốc độ và các thông số căn chỉnh của mạch vòng, bộ điều khiển động cơ sẽ tự động điều chỉnh vận tốc động cơ theo thời gian thực để đạt được các yêu cầu của ứng dụng.
Theo cách này, động cơ servo sẽ thực hiện đúng theo các thông số đã cài đặt ngay cả khi điều kiện vận hành thay đổi. Ví dụ như, nếu động cơ servo truyền động cho một cơ cấu có trọng lượng lớn, động cơ sẽ rất khó để giảm tốc. Trong trường hợp này, động cơ có thể tăng mô men nghịch để dừng tải trong khoảng thời gian và khoảng cách theo yêu cầu của ứng dụng.
- Điều khiển Mô men (Current Loop)
Mô men của động cơ Servo là lực tạo ra từ chuyển động quay của rotor động cơ.
Mô men tạo ra tỷ lệ thuận với dòng điện hiệu dụng chạy trong cuộn dây stator của động cơ. Dòng hiệu dụng càng cao, mô men sinh ra càng lớn.
Bộ điều khiển động cơ servo đo trị số dòng hiệu dụng chạy trong cuộn dây stator và dùng phản hồi giá trị này để tự động điều chỉnh dòng điện trong động cơ theo thời gian thực nhằm đáp ứng được yêu cầu mô men của ứng dụng.
Mạch vòng dòng điện đôi khi được hiểu là mạch vòng mô men.
Trong ví dụ sau, bộ điều khiển gửi đi 32 xung để điều khiển vị trí động cơ.
Bộ mã hóa xung vòng quay gửi tín hiệu phản hồi vị trí của động cơ. Sai số nhận được sẽ được sử dụng để điều chỉnh động cơ đến vị trí đúng.
Do quán tính nên động cơ chuyển động vượt quá vị trí chuẩn một chút, sai số vị trí này sẽ được dùng để điều chỉnh động cơ về vị trí đúng.
Bộ phản hồi mã hóa xung vòng quay 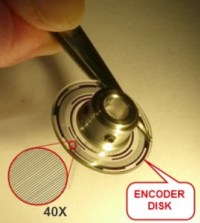
Bộ mã hóa xung vòng quay (encoder) là thiết bị phần cứng thiết yếu của hệ thống động cơ servo có tác dụng phản hồi tốc độ và vị trí.
Thông thường, bộ mã hóa xung vòng quay nằm trong hoặc được gắn với động cơ servo. Trong một vài ứng dụng, bộ mã hóa xung vòng quay là thiết bị được gá lắp riêng biệt với động cơ. Cách gá lắp này giúp cho bộ mã hóa xung vòng quay ghi nhận được các thông số khác ảnh hưởng đến hoạt động của động cơ servo.
Có hai dạng bộ mã hóa xung vòng quay chính:
- Bộ mã hóa xung vòng quay tỷ lệ (incremental)
- Bộ mã hóa xung vòng quay tuyệt đối (absolute)
Cấu trúc vật lý của bộ mã hóa xung vòng quay quyết định dạng tín hiệu phản hồi. Chúng ta hãy cùng xem chúng khác nhau như thế nào!
1. Bộ mã hóa xung vòng quay tỷ lệ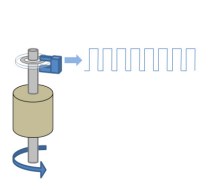
Bộ mã hóa xung vòng quay tỷ lệ áp dụng nguyên lý quang học sử dụng một đĩa thủy tinh trong suốt được in các vạch đối xứng tỏa tròn theo khoảng cách đều. Đĩa này được gắn cố định với trục động cơ và quay cùng rotor của động cơ.
Các vạch trên đĩa được phát hiện bởi một cảm biến quang điện. Đầu ra của cảm biến thay đổi mỗi khi có sự thay đổi từ sáng sang tối hoặc từ tối sang sáng. Tốc độ thay đổi này tỷ lệ thuận với vận tốc động cơ. Đầu ra của bộ mã hóa xung vòng quay là một dải xung tỷ lệ với vận tốc động cơ. Đầu ra này đôi lúc còn được gọi là tín hiệu Pha A.
Như vậy, với bộ mã hóa này chúng ta không thể biết được chiều quay mà chỉ biết được tốc độ của động cơ.
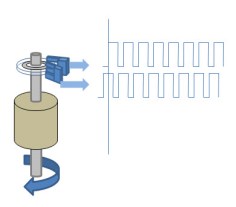
Để biết được chiều quay, bộ mã hóa xung vòng quay tỷ lệ cần lắp thêm một cảm biến quang thứ hai, cách cảm biến thứ nhất một khoảng cách nhất định.
  |
|
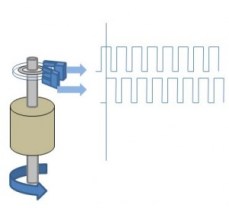
| Khi thay đổi chiều quay thì xung cũng thay đổi | |
Vị trí của cảm biến thứ hai được lắp ở trị trí sao cho sự thay đổi sáng tối làm cho đầu ra của cảm biến thứ hai lệch pha 90 độ so với cảm biến thứ nhất. Quan hệ giữa các xung này được gọi làchậm pha ¼ chu kỳ.
Bằng cách so sánh hai dãy xung lệch pha này, ngoài xác định được vận tốc quay còn có thể xác định được chiều quay!
Đầu ra từ cảm biến thứ 2 còn được gọi là tín hiệu Pha B.
Bên cạnh tín hiệu pha A và pha B, bộ mã hóa xung vòng quay có thể có đầu ra thứ ba được gọi là Pha Z.
Pha Z chỉ xuất đi một xung ứng với mỗi vòng quay. Tín hiệu này có tác dụng xác định vị trí gốc ban đầu hoặc vị trí tham chiếu.
Bộ mã hóa xung vòng quay tỷ lệ sử dụng xung tham chiếu này là điểm bắt đầu để từ đó xác định vị trí tuyệt đối bằng cách đếm số xung bắt đầu từ một vị trí đã biết.
2. Bộ mã hóa xung vòng quay tuyệt đối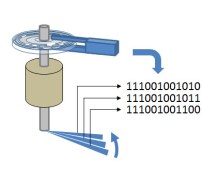
Bộ mã hóa xung vòng quay tuyệt đối cũng sử dụng một đĩa trong suốt; nhưng thay vì dùng các vạch in, đĩa này có các vùng trong suốt và vùng mờ sắp xếp theo mã nhị phân.
Mỗi bit mã hóa là một vùng riêng biệt trên đĩa và các cảm biến quang sẽ đồng thời đọc tất cả các vùng này.
Dữ liệu đọc từ đĩa là duy nhất ứng với mỗi vị trí góc của trục động cơ. Dữ liệu này có thể được gửi đi từ bộ mã hóa theo phương thức song song hoặc được chuyển đổi sang kiểu dữ liệu nối tiếp.
Số bit trong mã dữ liệu quy định độ phân giải góc của bộ mã hóa xung vòng quay. Theo lý thuyết, một bộ mã hóa xung vòng quay có độ phân giải 12 bit sẽ sinh ra 4096 mã đơn nhất khi quay một vòng 360 độ; hay nói cách khác khi trục động cơ quay được 0.088 độ sẽ xuất ra một mã đơn nhất. Có nhiều yếu tố ảnh hưởng tới việc tăng thêm số góc thực tế nhưng bộ mã hóa 20 bit cũng không phải là hiếm gặp.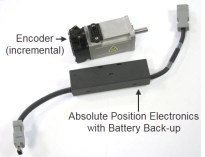
Một phương pháp khác để xác định vị trí tuyệt đối là kết hợp một dạng đặc biệt của bộ mã hóa xung vòng quay tỷ lệ với một bộ nhớ phần cứng cùng với một phần mềm riêng thay vì sử dụng chiếc đĩa đắt đỏ của bộ mã hóa tuyệt đối.
Thiết bị sử dụng các xung lũy tiến từ bộ mã hóa để tạo một vị trí ảo tuyệt đối trong bộ nhớ phần cứng. Nhờ có pin, bộ nhớ được duy trì ngay cả khi ngắt nguồn của hệ thống.
Cả hai dạng bộ mã hóa xung vòng quay tuyệt đối đều có thể gửi phản hồi vị trí cần thiết đến bộ điều khiển động cơ servo.
Năng lượng tái tạo
Hãy kích chuột vào nút Play để quan sát năng lượng tái sinh được tô màu đỏ.
Các bạn có thể sẽ ngạc nhiên khi biết rằng động cơ servo có thểphát điện!
Nếu quay một động cơ servo bằng một ngoại lực (ví dụ như quay bằng tay), một dòng điện sẽ được cảm ứng trong stator của động cơ!
Khi dùng một động cơ servo để nâng thiết bị công nghiệp theo phương thẳng đứng, động cơ phải thắng được trọng lực và phải sản sinh nhiều mô men hơn. Mặc dù vậy, khi thiết bị được hạ xuống, trọng lực này lại làm quay trục động cơ.
Đối với các chuyển động ngang, khi bộ điều khiển động cơ muốn giảm nhanh tốc độ một tải trọng nặng (phanh), quán tính của tải trọng sẽ làm trục động cơ tiếp tục quay và năng lượng điện thừa sinh ra cần phải được tiêu tán.
Năng lượng này được gọi là năng lượng tái sinh, và bộ điều khiển động cơ servo được thiết kế để tiêu tán một lượng năng lượng tái sinh nhất định.
Nếu năng lượng tái sinh này vượt quá khả năng tiêu tán của bộ điều khiển, chúng ta cần lắp thêm điện trở hãm để tiêu tán năng lượng này thành dạng nhiệt năng.
Chia sẻ:
Các tin khác
- Hướng dẫn lập trình Tiện CNC hệ Fanuc 09/11/2025
- Sên (xích) xe máy 01/10/2025
- tài liệu cimatron tuyển 3D KORESU 15/06/2025
- Hướng dẫn Điều khiển vị trí bằng xung và tín hiệu hướng (MINAS A5/A5E/A6SG/A6SF) 28/02/2025
- Thiết bi và dụng cụ trong gia công EDM 24/04/2024
- Chu trình khoan trong phay CNC 23/04/2024
- Các mã lệnh gia công CNC phổ biến 04/08/2023



